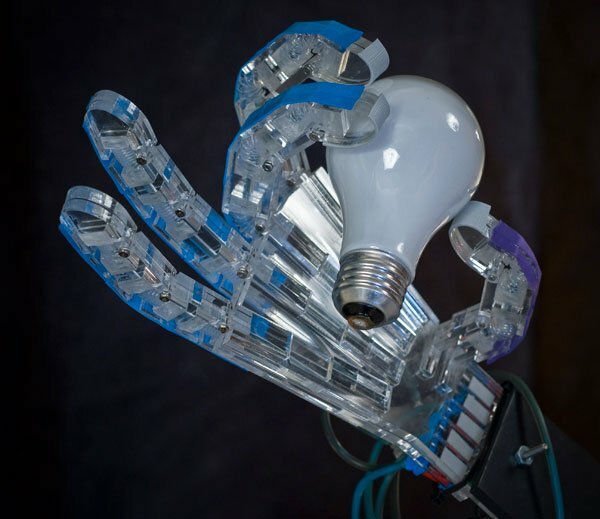
Главная особенность манипулятора - в так называемых “жидкостных мускулах” (Fluidic Muscle). Система приводится в движение 32 искусственными мускулами, число которых примерно в два раза меньше, чем в настоящей руке и плечевом поясе.

Манипулятор работает от сжатого воздуха (до 6-8 атмосфер).
Развиваемая сила и перемещение составных частей руки постоянно измеряются встроенными датчиками перемещения в количестве 6 штук и давления воздуха (индивидуальны для каждого мускула).
Манипулятор работает от сжатого воздуха (до 6-8 атмосфер).
Развиваемая сила и перемещение составных частей руки постоянно измеряются встроенными датчиками перемещения в количестве 6 штук и давления воздуха (индивидуальны для каждого мускула).